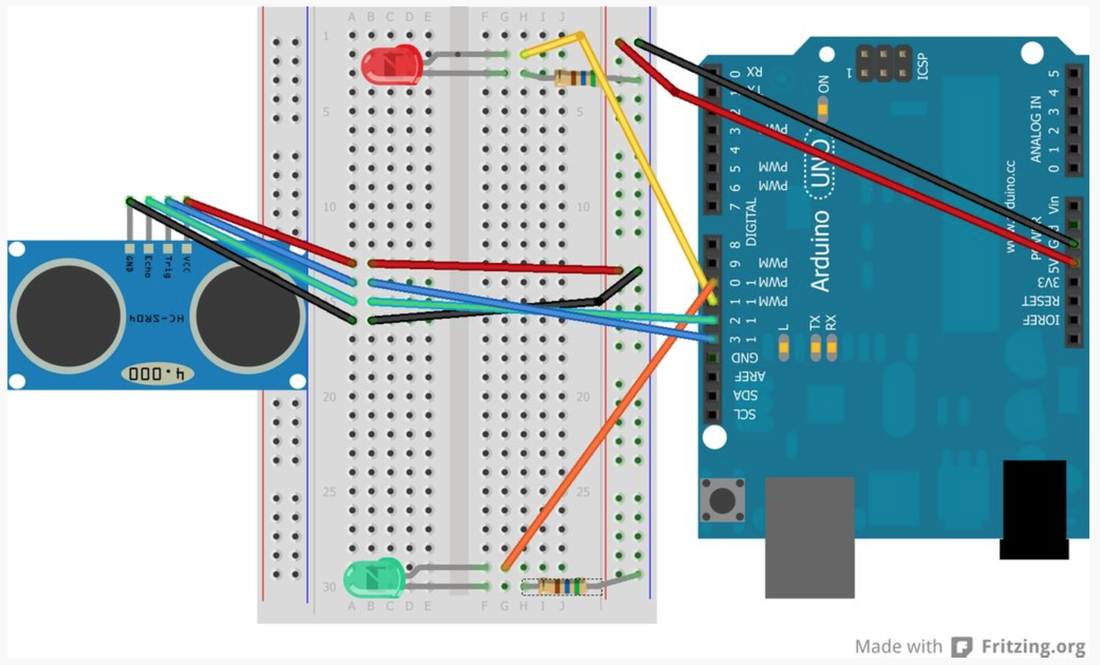
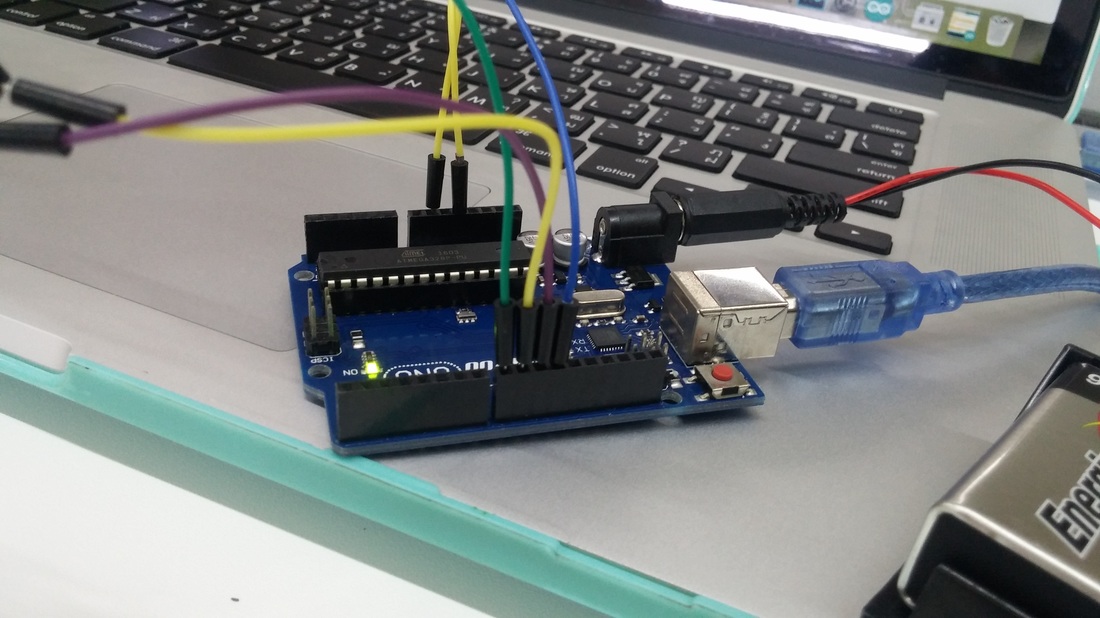
| First, you'll need to download the 1Sheeld application in your mobile phone. I chose to do the camera shield using Arduino board, breadboard, jumper wires, pushbutton, and 1Sheeld board. http://1sheeld.com/tutorials/special-shields/ I used a simple set up for the push button. The website above doesn't provide schematics and I wasn't skilled enough to come up with my own set up. Consequently I initially used my classmate's set up, but it didn't work on my laptop so I used Mr. Robert's set up. During the set up process, I had difficulty trying to connect my laptop with the 1Sheeld board. There were 3 ports; 2 of them include the word 'bluetooth' in the port's name and the other one had the word 'USB' in the name. I didn't know which one is the correct port so I tried connecting to all of them, and in the end the USB port worked. When uploading the code from the website, you'll need to use Google Chrome, and on the 1Sheeld, push the button to the right to upload the code. When you're done uploading the code, push the button to the left. Next, turn on bluetooth from your phone's 1Sheeld app. It was hectic here since my classmates and I were trying to connect our phone (using bluetooth) all at the same time and so we struggled to connect the device because the we didn't know which device was ours. |  |
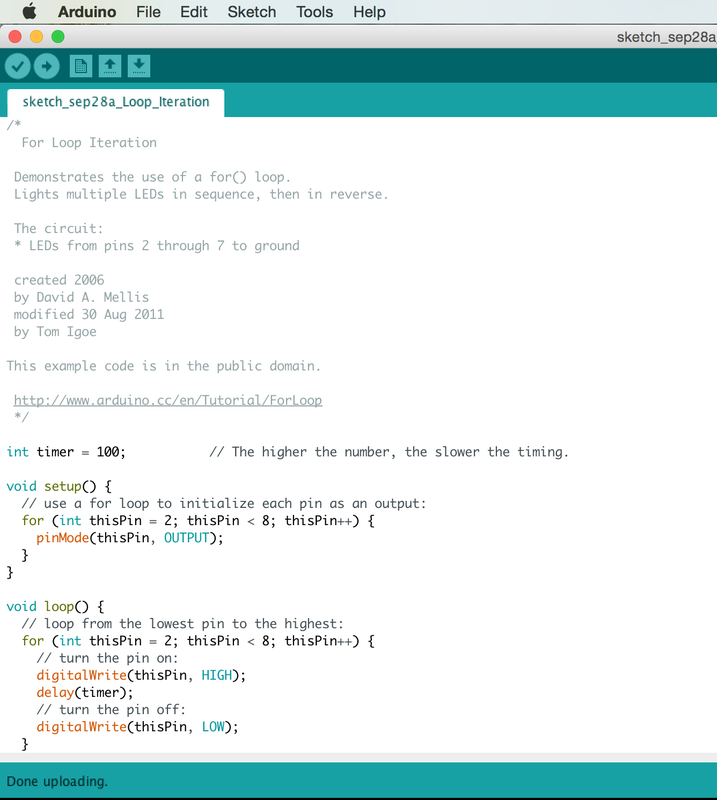
I directly uploaded the code through the sketch on the website. Select "Arduino Uno" in the left bar below the sketch, and then select the port and upload the code (using bluetooth may drain your phone battery really fast). Go to the camera shield in the app, and now when you push the button, the camera on your phone should snap a photo! (I don't know why mine and my classmates' phone camera continuously snapped photos even though we only pressed the button once. It worked well for Mr. Robert's phone though). The quality of the photos are not that good and every time the camera snaps the flash used (I don't know why flash is turned on; perhaps it is automatic?). Below are some random photos I took using this experiment.





























 RSS Feed
RSS Feed
